

Scalable jet swimmer-appears in Advanced Materials

|
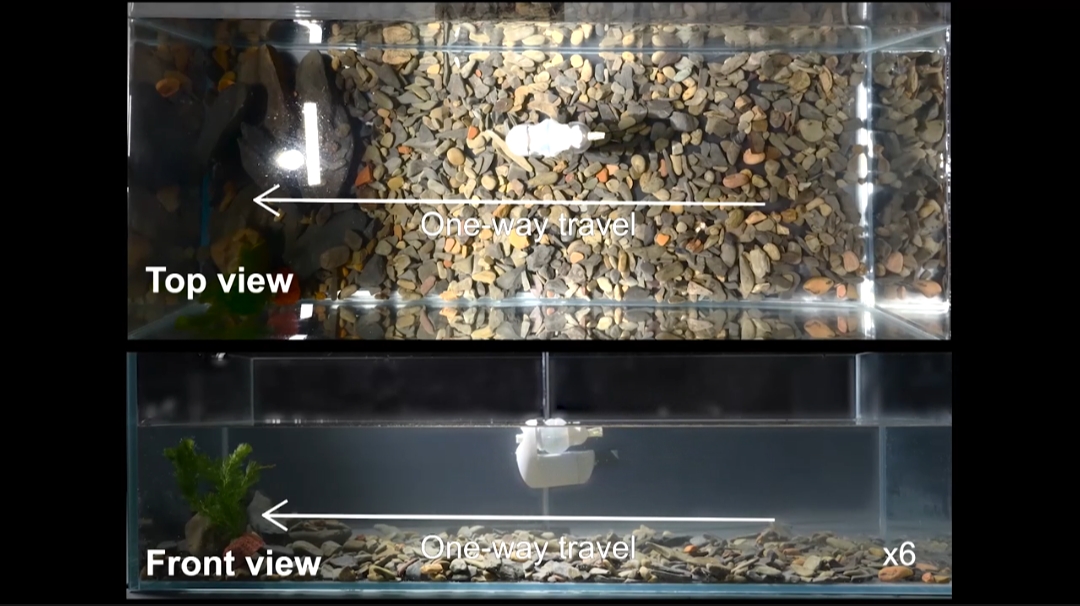
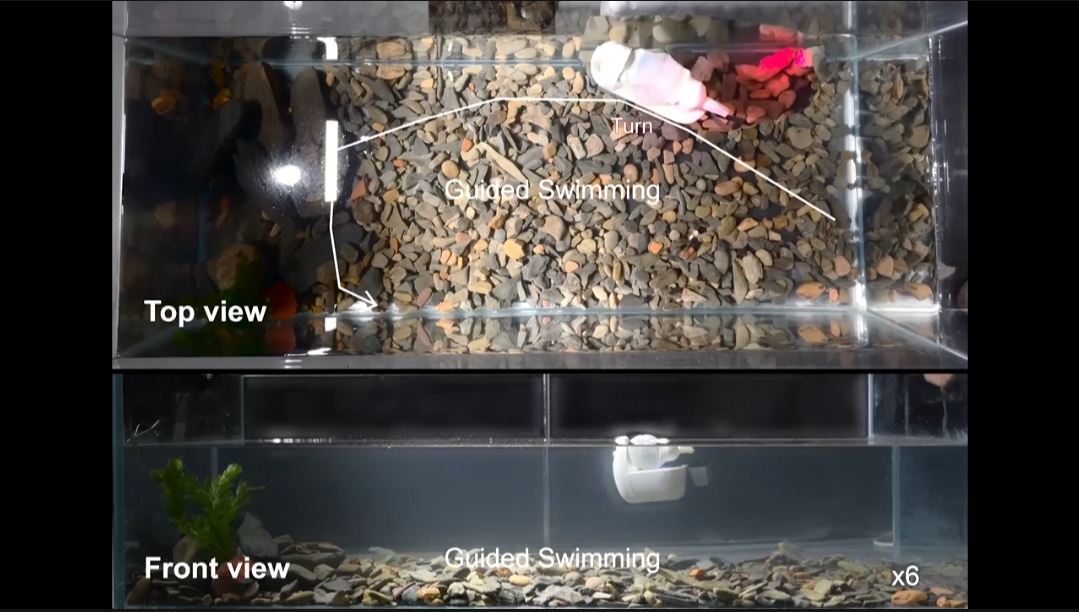
Cephalopods, such as squid and nautilus, achieve fast swimming by jetting water swiftly from their chambers, offering benefits in swimming speed, energy efficiency, and silent operation. Inspired by these animals, Prof. Ke Liu and his collaborators proposed a scalable soft robotic jet swimmer that utilizes soft chamber buckling to enable rapid water jetting. The design incorporates three main components: the knotted artificial muscle (KAM), an origami-inspired soft chamber, and a custom control module. The KAM generates significant force and stroke with minimal self-weight, but its actuation speed is insufficient for propelling water. To address its limited actuation speed, we design an origami-inspired soft chamber that buckles instantly when the KAM's pulling force reaches a critical threshold, thereby amplifying actuation speed and enabling rapid water jetting. The control module periodically activates the KAM to tighten and release, facilitating effective pulsatile propulsion. Similar to Cephalopods, this design is scalable and robust. We demonstrate effective swimming of two robots with drastically different sizes, achieving a top speed of 0.62 body length per second. We also show that the propulsion is minimally compromised even when the KAM is significantly damaged. To further enable guided locomotion, a shape memory alloy rudder is incorporated for steering via infrared stimulation. This work demonstrates successful pulsatile jet swimming through the integration of smart materials and structures, laying the groundwork for future innovations in underwater soft robotics. The work was published in Advanced Materials on June 13, 2025.
|
Movies
 |
 |
 |
| Movie 1 | Movie 2 | Movie 3 |