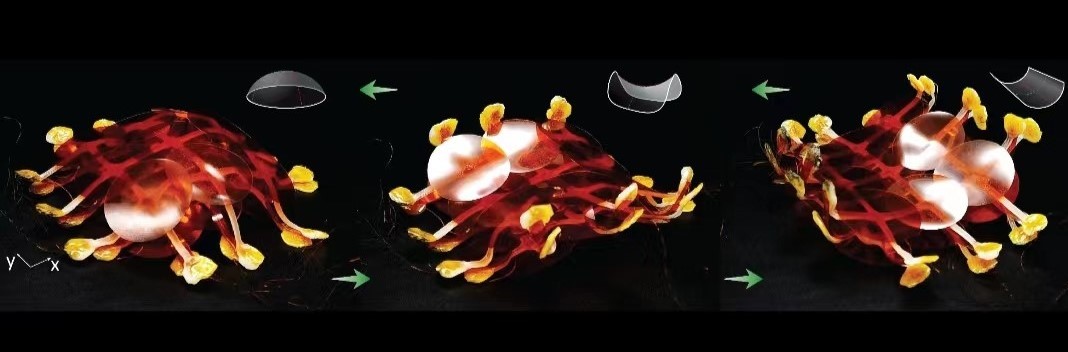
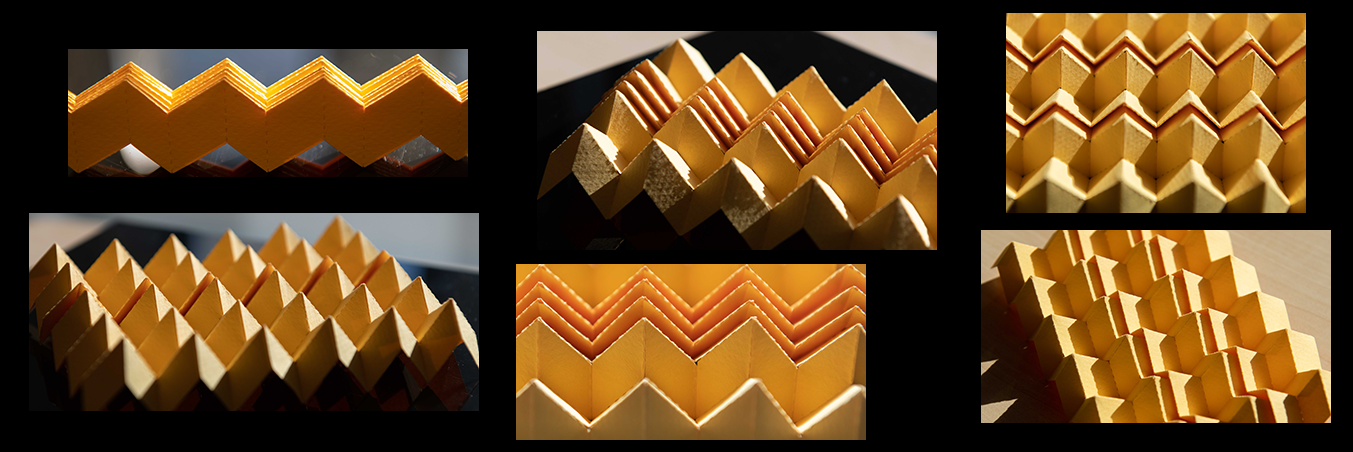


We study the interplay between geometry and function, at different scales, applied to a variety of mechanical systems including soft robots, metamaterials, deployable structures, etc. Through innovative designs, we leverage material intelligence and structural superiority to create novel and functional robots and materials, addressing the grand challenges in health and sustainability.